Difference of Gaussians (DoG) and Image Feature Detection
When working with images, simply smoothing them is often not enough. In many computer vision tasks, we want to highlight important structures such as edges, corners or blobs, while still suppressing random noise. The Difference of Gaussians (DoG) technique achieves this by combining noise reduction with feature enhancement.
How Difference of Gaussians Works (In Simple Terms)
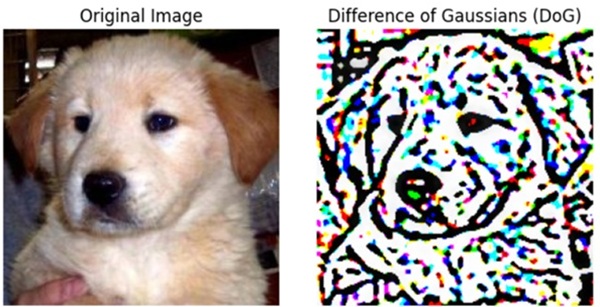
Imagine blurring the same image twice once slightly and once more strongly. The first blur keeps more details, while the second removes finer structures. When we subtract the two blurred images, the common smooth regions cancel out, leaving behind areas where the intensity changes significantly.
These remaining regions correspond to edges and blob like structures in the image. Since both images are Gaussian smoothed, much of the noise is already reduced before subtraction.
Example: DoG Feature Enhancement
Mathematical Explanation
Let an image be represented as a function I(x, y). Difference of Gaussians applies two Gaussian filters with different standard deviations and subtracts the results:
The final DoG image is computed as:
Here, σ₁ controls fine smoothing and σ₂ controls coarser smoothing. A common choice is σ₂ ≈ 1.6 × σ₁. DoG acts as a band-pass filter, removing very low frequency (flat regions) and very high-frequency (noise) components.
Understand the math behind the Difference of Gaussians band-pass filter and how it is implemented.
View Technical details →Why Use Difference of Gaussians?
- Noise Reduction: Noise is suppressed by Gaussian smoothing before subtraction.
- Edge & Blob Detection: Highlights regions with strong intensity variations.
- Scale Space Analysis: Detects features at different image scales.
- Computer Vision: Widely used in feature detectors such as SIFT.
Kernel Size and Sigma Matter
The behaviour of DoG depends on the choice of kernel size and sigma values for both Gaussian filters:
- Small σ difference: Detects fine details and small edges.
- Large σ difference: Detects larger blobs and coarse structures.
- Automatic kernels (0×0): Preferred for accurate scale space representation.
Kernel sizes must be odd to maintain a clear center pixel. In DoG, the relationship between σ values is more important than the kernel size itself.